
Pengendalian Sudut Pitch dan Roll Pesawat Flying Wing
Abstrak
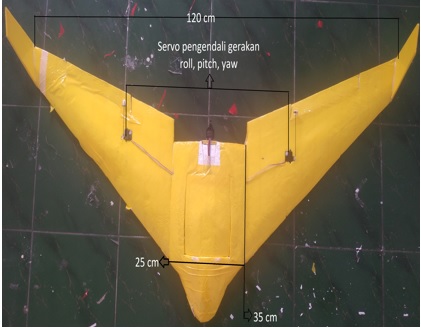
The development of the aviation world in recent years has increased, one of which is the field of unmanned aerial vehicles. This development is in line with the increasing use of UAVs in various fields, including for military missions, natural disaster monitoring missions, and aerial photography missions. Many types of aircraft that can be used to complete these missions, one type of aircraft that is widely used is the flying wing type aircraft. This type of aircraft is triangular in shape and does not have a tail. This aircraft controller uses elevons on the right and left sides of its wings, and its form is relatively small, so this aircraft is susceptible to environmental disturbances and causes flight mission failures. To overcome this problem, a control system is needed that is able to make the aircraft maintain flight stability. In this study, the Linear Quadratic Regulator control method was applied to overcome this. The LQR control method is used to control the pitch and roll angles of the aircraft. Based on the test results, the interference given can be handled well by the aircraft. It was proven that when given a disturbance, the aircraft experienced an overshoot of 4.24º at the pitch angle and 4.26º at the roll angle, but could quickly return to the setpoint within 1.2 seconds at the pitch angle, and 1.3 seconds at the roll angle. Thus the aircraft is able to maintain flight stability.
##plugins.generic.usageStats.downloads##
Referensi
[1] D. Ardiantara, R. Sumiharto, and S. B. Wibowo, “Purwarupa Kontrol Kestabilan Posisi dan Sikap pada Pesawat Tanpa Awak Menggunakan IMU dan Algoritma Fusion Sensor Kalman Filter,” IJEIS (Indonesian J. Electron. Instrum. Syst., vol. 4, no. 1, pp. 25–34, 2014, doi: 10.22146/ijeis.4219.
[2] L. A. Sutawati, I. N. S. Kumara, and W. Widiadha, “Pengembangan Three Degree of Freedom Hexapod sebagai Robot Pemadam Api dengan Sensor UVTron Hamamatsu,” Maj. Ilm. Teknol. Elektro, vol. 17, no. 3, p. 417, 2018, doi: 10.24843/mite.2018.v17i03.p17.
[3] J. Kurniati, Rezki, “Seminar Nasional Industri dan Teknologi (SNIT), Politeknik Negeri Bengkalis,” Peranc. Apl. Antrian Pasien Di Rumah Sakit Menggunakan Metod. Fast, no. Lcm, pp. 270–276, 2019.
[4] A. Majid, R. Sumiharto, and S. B. Wibisono, “Identifikasi Model dari Pesawat Udara Tanpa Awak Sayap Tetap Jenis Bixler,” IJEIS (Indonesian J. Electron. Instrum. Syst., vol. 5, no. 1, p. 43, 2015, doi: 10.22146/ijeis.7152.
[5] H. Purnawan, Mardlijah, and E. B. Purwanto, “Design of linear quadratic regulator (LQR) control system for flight stability of LSU-05,” J. Phys. Conf. Ser., vol. 890, no. 1, 2017, doi: 10.1088/1742-6596/890/1/012056.
[6] E. Irmawan, P. Mulyono, P. Studi, T. Dirgantara, S. Tinggi, and T. Kedirgantaraan, “KENDALI FUZZY-PID PADA SIKAP LONGITUDINAL DAN SIKAP,” vol. 2, no. 2, pp. 1–7, 2018.
[7] Z. Angeline Rerung, E. Sofyan, and F. Setiawan, “Analisis Kestabilan Statik Dan Dinamik Pada Pesawat Lsu-05 Ng (Lapan Surveillance Uav 05 New Generation) Dengan Menggunakan Perangkat Lunak Xflr5,” Tek. STTKD J. Tek. Elektron. Engine, vol. 6, no. 2, pp. 76–83, 2020, doi: 10.56521/teknika.v6i2.215.
[8] T. kuntoro Priyambodo, A. Dharmawan, O. A. Dhewa, and N. A. S. Putro, “Desain of Flight Control System for Flying Wing UAV Based on Pitch and Roll Rotation,” vol. 03, no. 09, pp. 6–9, 2016.
[9] T. Susanto and S. Ahdan, “Pengendalian Sikap Lateral Pesawat Flying wing Menggunakan Metode LQR,” PRotek J. Ilm. Tek. Elektro, vol. 7, no. 2, pp. 99–103, 2020, doi: 10.33387/protk.v7i2.2034.
[10] A. Crasta and S. A. Khan, “EFFECT OF ANGLE OF INCIDENCE ON STABILITY DERIVATIVES OF A WING,” pp. 1–6, 1978.
[11] W. Ratnasari, E. Apriliani, and M. Mardlijah, “Desain Kontrol pada Model Gerak Lateral-Direksional Unmanned Aerial Vehicle (UAV) Menggunakan Output Feedback Control,” J. Sains dan Seni ITS, vol. 11, no. 2, 2022, doi: 10.12962/j23373520.v11i2.75502.
[12] A. P. Wijaya, A. Triwiyatno, and B. Setiyono, “Perancangan Self Balancing Pitch Control Dengan Metode Kontrol Fuzzy Pada Unmanned Aerial Vehicle Fixed Wing,” Peranc. Self Balanc. Pitch Control Dengan Metod. Kontrol Fuzzy Pada Unmanned Aer. Veh. Fixed Wing, vol. 17, no. 4, pp. 162–171, 2015, doi: 10.12777/transmisi.17.4.162-171.
[13] A. N. T.Susanto, S.D.Riskiono, Rikendry, “IMPLEMENTASI KENDALI LQR UNTUK PENGENDALIAN SIKAP LONGITUDINAL PESAWAT FLYING WING,” J. Electro Luceat, vol. 6, no. 2, pp. 245–254, 2020.
[14] P. Nu, W. Lin, N. L. Kham, and H. M. Tun, “Longitudinal And Lateral Dynamic System Modeling Of A Fixed-Wing UAV,” Int. J. Sci. Technol. Res., vol. 6, no. 4, pp. 171–174, 2017.
[15] M. Fajar and O. Arifianto, “PERANCANGAN AUTOPILOT LATERAL-DIREKSIONAL PESAWAT NIRAWAK LSU-05 (THE DESIGN OF THE LATERAL-DIRECTIONAL AUTOPILOT FOR THE LSU-05 UNMANNED AERIAL VEHICLE),” vol. 05, pp. 93–104, 2017.
[16] E. Irmawan and E. E. Prasetiyo, “Kendali Adaptif Neuro Fuzzy PID untuk Kestabilan Terbang Fixed Wing UAV ( Adaptive Control of Neuro Fuzzy PID for Fixed Wing UAV,” vol. 9, no. 1, pp. 73–78, 2020.
[17] O. A. Dhewa, A. Dharmawan, and T. K. Priyambodo, “Model of Linear Quadratic Regulator ( LQR ) Control Method in Hovering State of Quadrotor,” vol. 9, no. 3, pp. 135–143, 1843.
[18] L. M. Argentim, W. C. Rezende, P. E. Santos, and R. A. Aguiar, “PID, LQR and LQR-PID on a quadcopter platform,” 2013 Int. Conf. Informatics, Electron. Vision, ICIEV 2013, no. February 2015, 2013, doi: 10.1109/ICIEV.2013.6572698.
[19] G. E. Setyawan, W. Kurniawan, and A. C. L. Gaol, “Linear Quadratic Regulator Controller (LQR) for AR. Drone’s Safe Landing,” Proc. 2019 4th Int. Conf. Sustain. Inf. Eng. Technol. SIET 2019, pp. 228–233, 2019, doi: 10.1109/SIET48054.2019.8986078.
[20] K. Ogata, Modern Control Engineering. 2009.
[21] “C Balas Modelling and Linear Control of a Quadrotor School of Engineering.”
[22] J. P. Sembiring, F. Rossi, and T. Susanto, “Kendali Sudut Pitch dan Roll fase Lepas Landas pada Pesawat VTOL- plane,” vol. 21, no. 1, 2022.
[23] B. Liu and Z. Jiao, “LQR lateral-directional control law design for distributed propulsion layout flying wing,” 2017 IEEE Int. Conf. Cybern. Intell. Syst. CIS 2017 IEEE Conf. Robot. Autom. Mechatronics, RAM 2017 - Proc., vol. 2018-Janua, pp. 715–719, 2018, doi: 10.1109/ICCIS.2017.8274866.
[24] R. Nelson, “Robert Nelson Flight Stability and Automatic Control 2nd Ed.” 1997.
[25] R. Andini and Y. P. Astuti, “MATH unesa,” J. Ilm. Mat., vol. 9, no. 2, pp. 437–446, 2021, [Online]. Available: https://media.neliti.com/media/publications/249234-model-infeksi-hiv-dengan-pengaruh-percob-b7e3cd43.pdf.
[26] E. saputra E. I nyoman, I. R. Agung, and Y. Divayana, “ED-255EK Embeded Education Platform Sebagai Modul Praktikum Embeded System Dengan Robot Arm Module Dan Voice Module,” Maj. Ilm. Teknol. Elektro, vol. 18, no. 1, p. 91, 2019, doi: 10.24843/mite.2019.v18i01.p13.

This work is licensed under a Creative Commons Attribution 4.0 International License

